Tom,
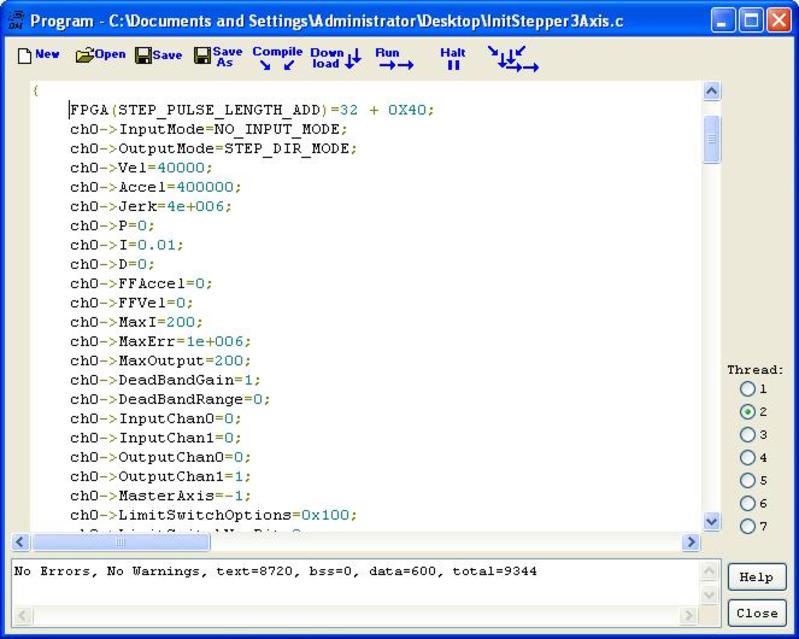
After looking more closely at the stepper driver, I see what you mean with the diagram, thanks for the help, I now have the stepper moving oddly. When I go to the Step/Response screen and click Step I get a single step, pause, then another heavier step. I got rid of the 0X40 in the
FPGA(STEP_PULSE_LENGTH_ADD)=32 + 0x40;
When I select Move I get nothing.
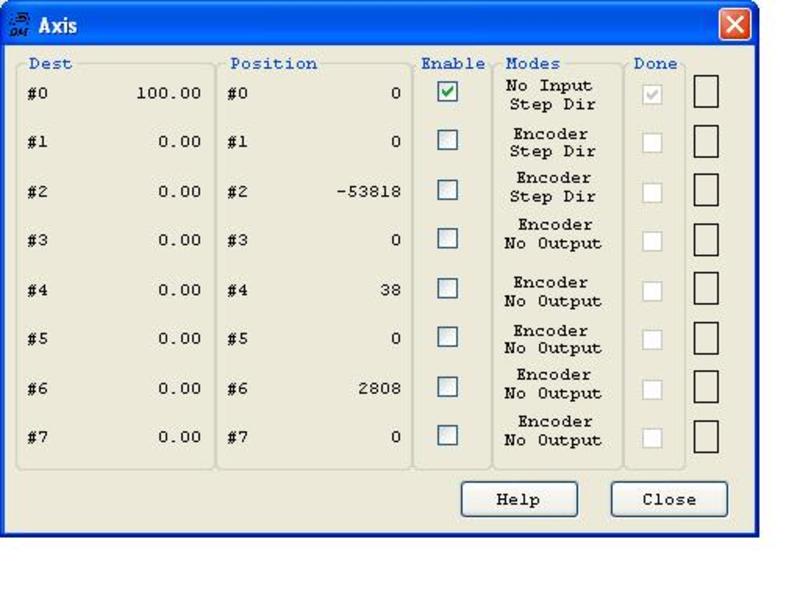
I'm also not sure if it means much but when the plot is generated I get Command (single square wave), Position (nothing, but that's expected) and Output (nothing but I was expecting something here).
Am I missing something blatantly obvious or is there something else I don't know, (I know I opened that one up).
Thanks again,
Steve
{kind=link}
{kind=link}
{kind=link}